










































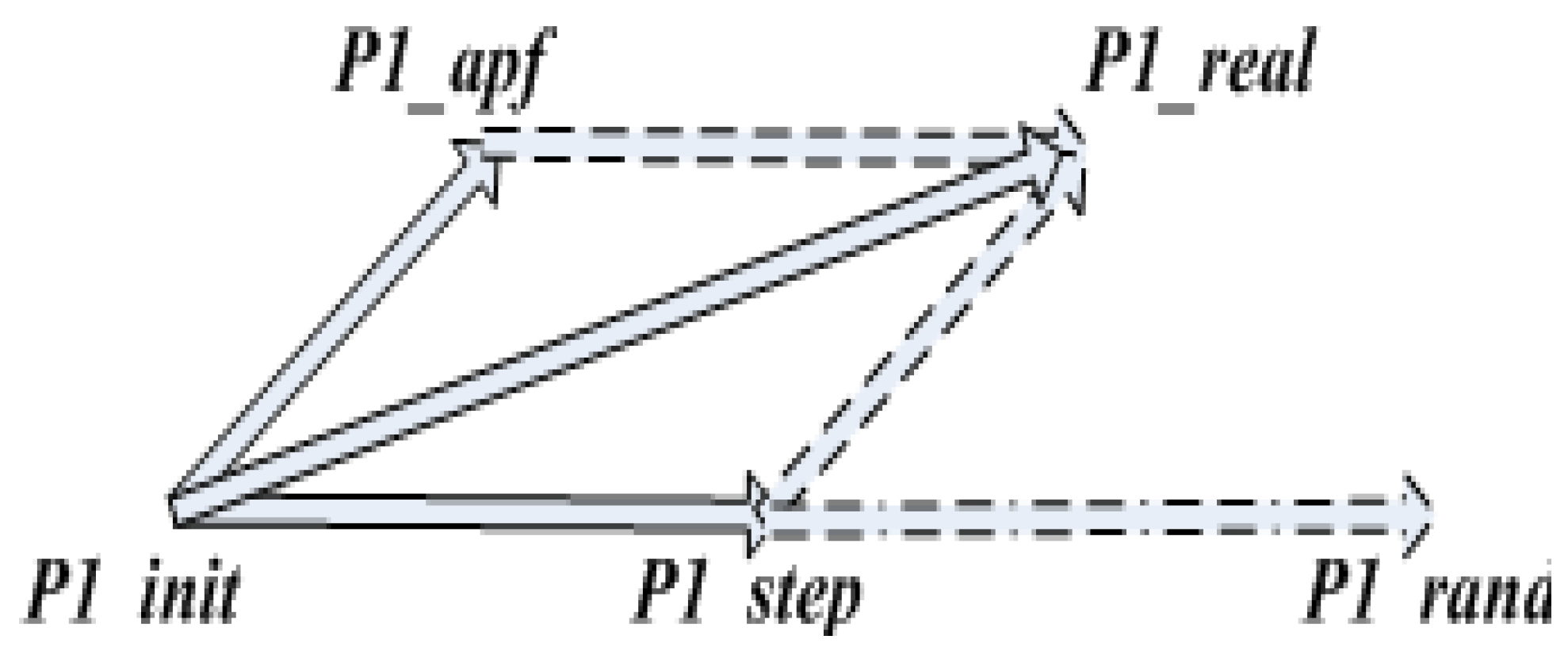


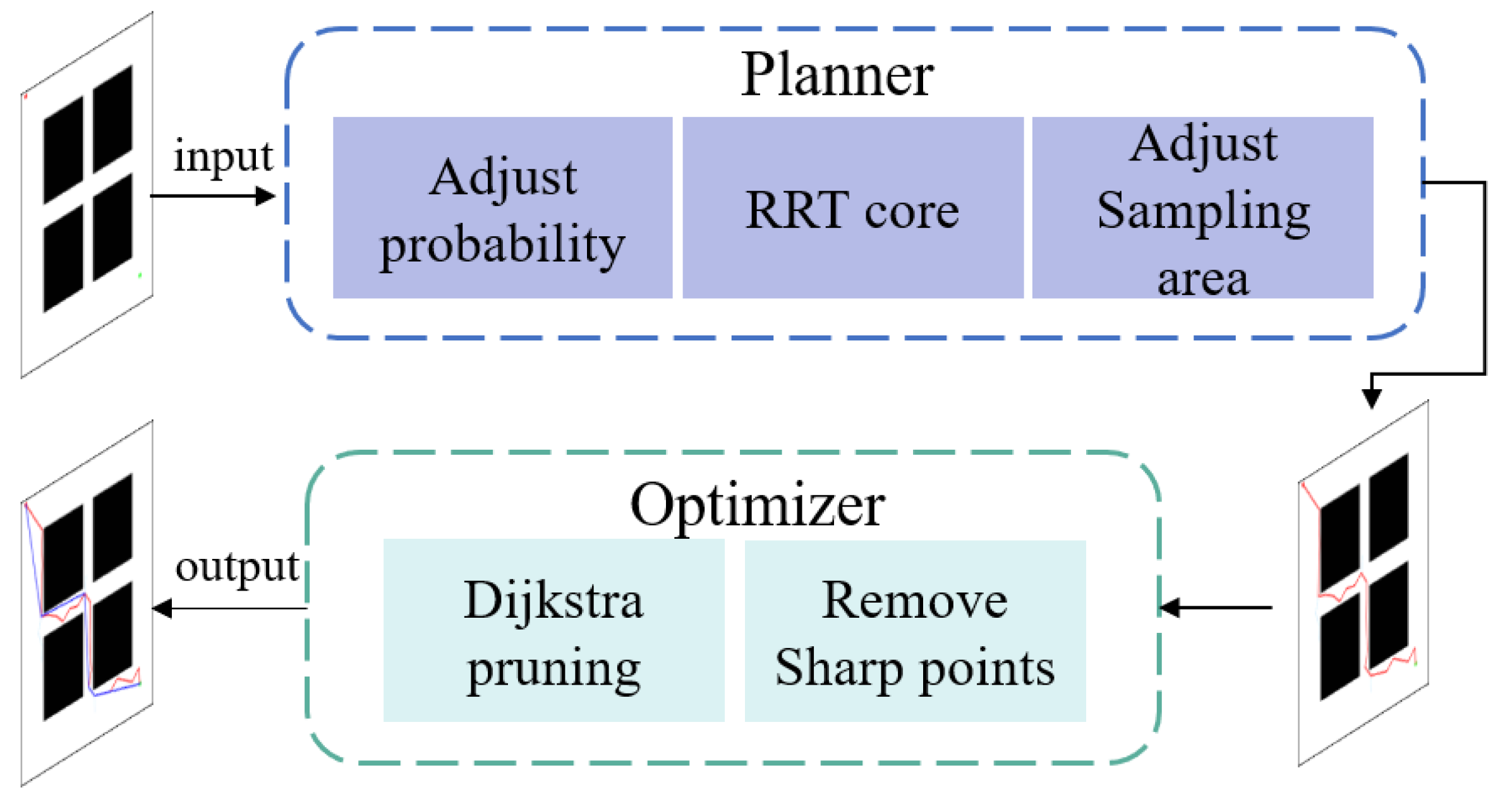
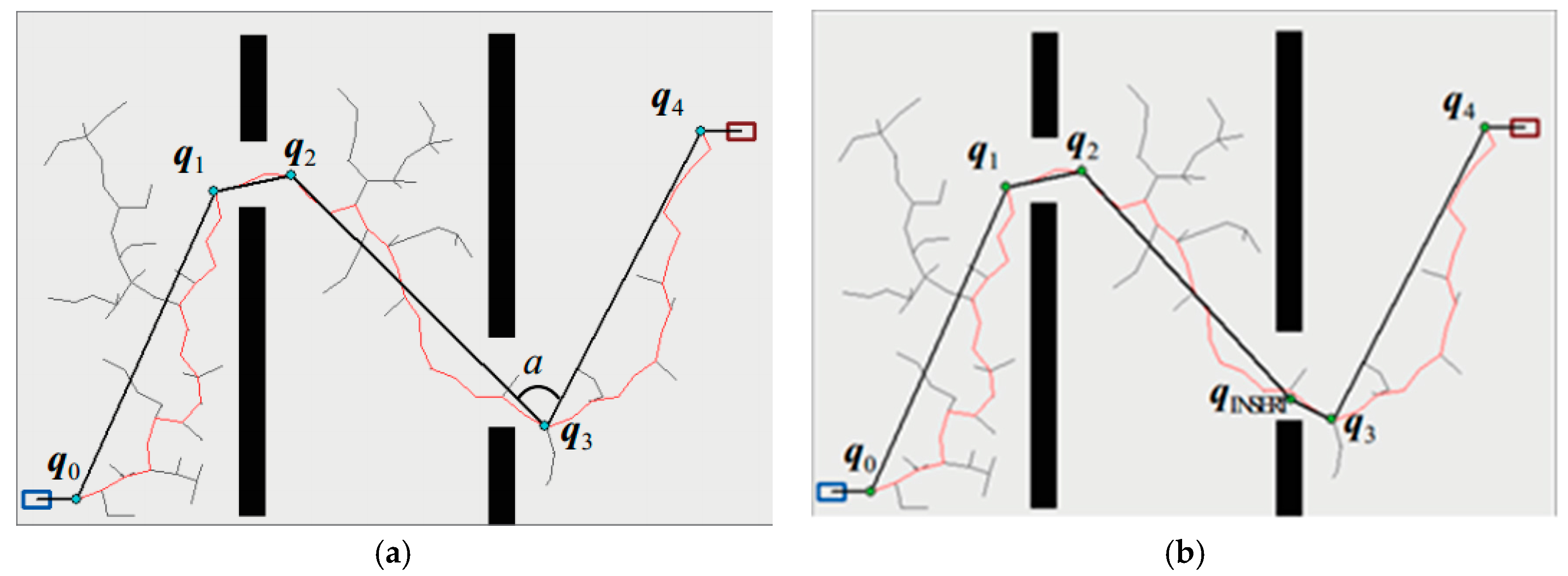
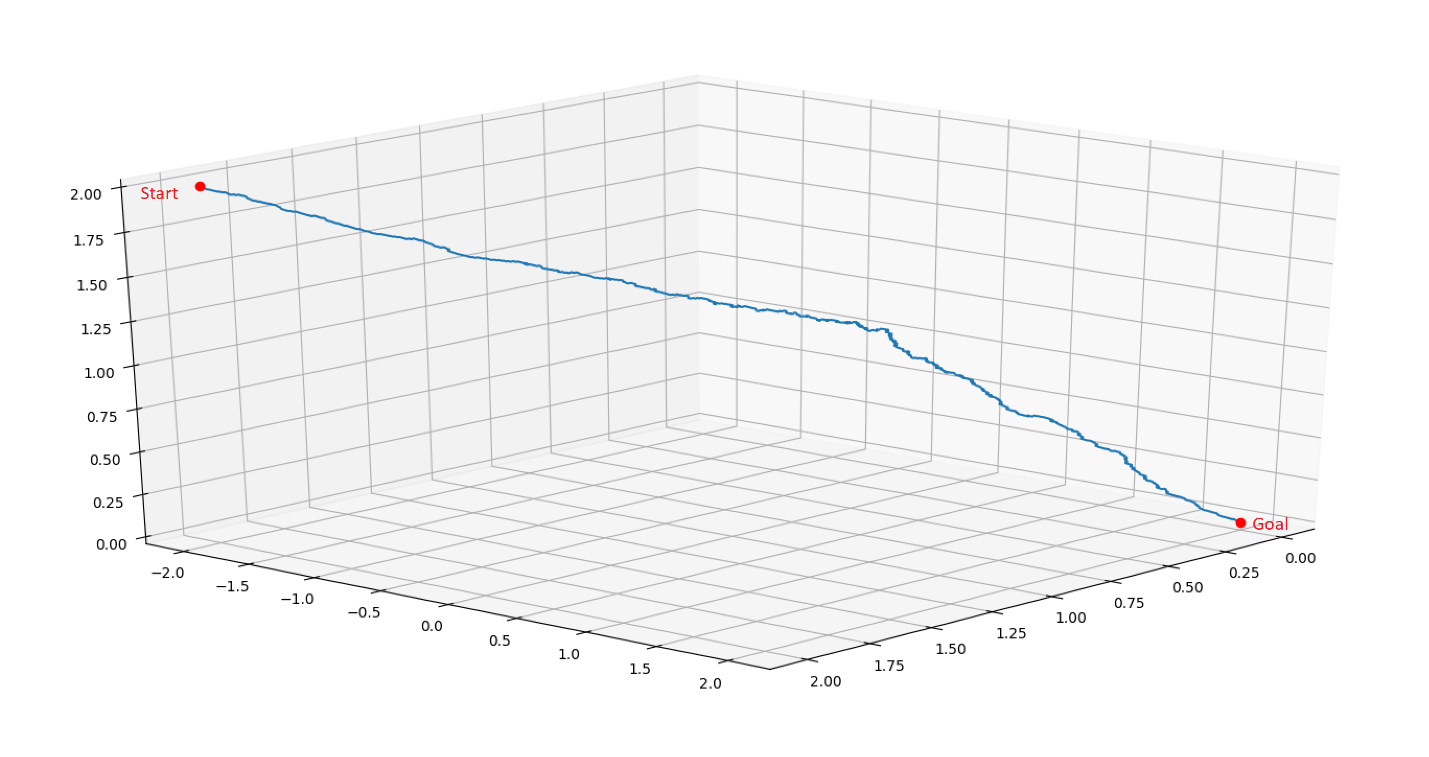
![[2211.06801] BTO-RRT: A rapid, optimal, smooth and point cloud-based ...](https://ar5iv.labs.arxiv.org/html/2211.06801/assets/BTO_RRT_CORE_1.png)




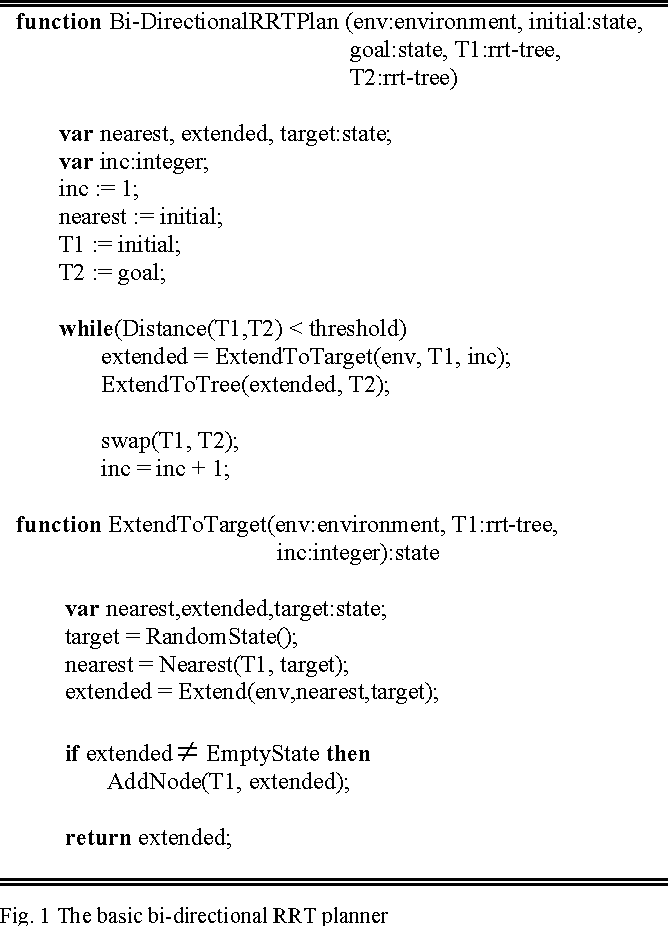

















![[review]A Review of Mobile Robot Motion Planning Methods](https://clement5140.github.io/AClement-s-Notebook/autonomous-systems/assets/2.png)

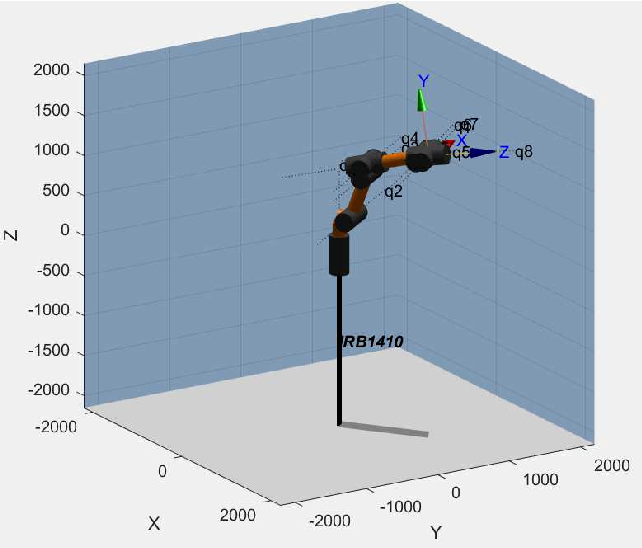



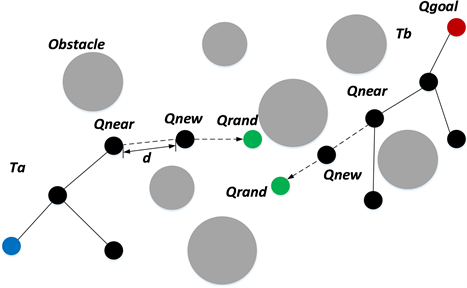



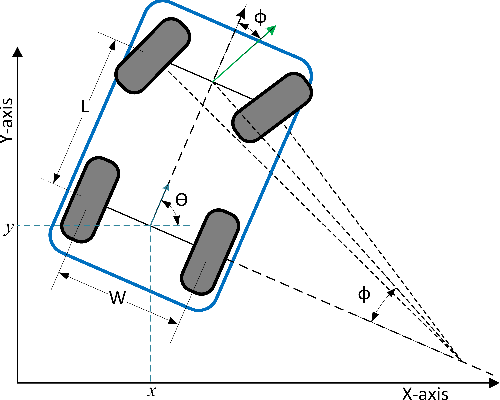
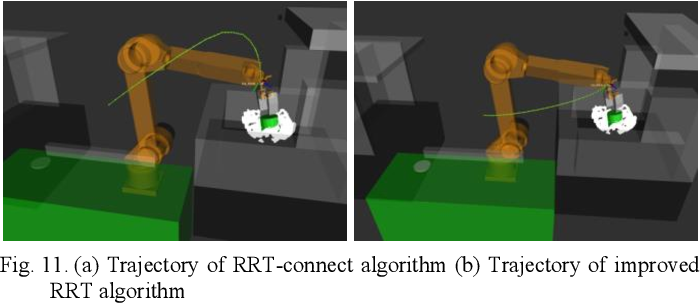
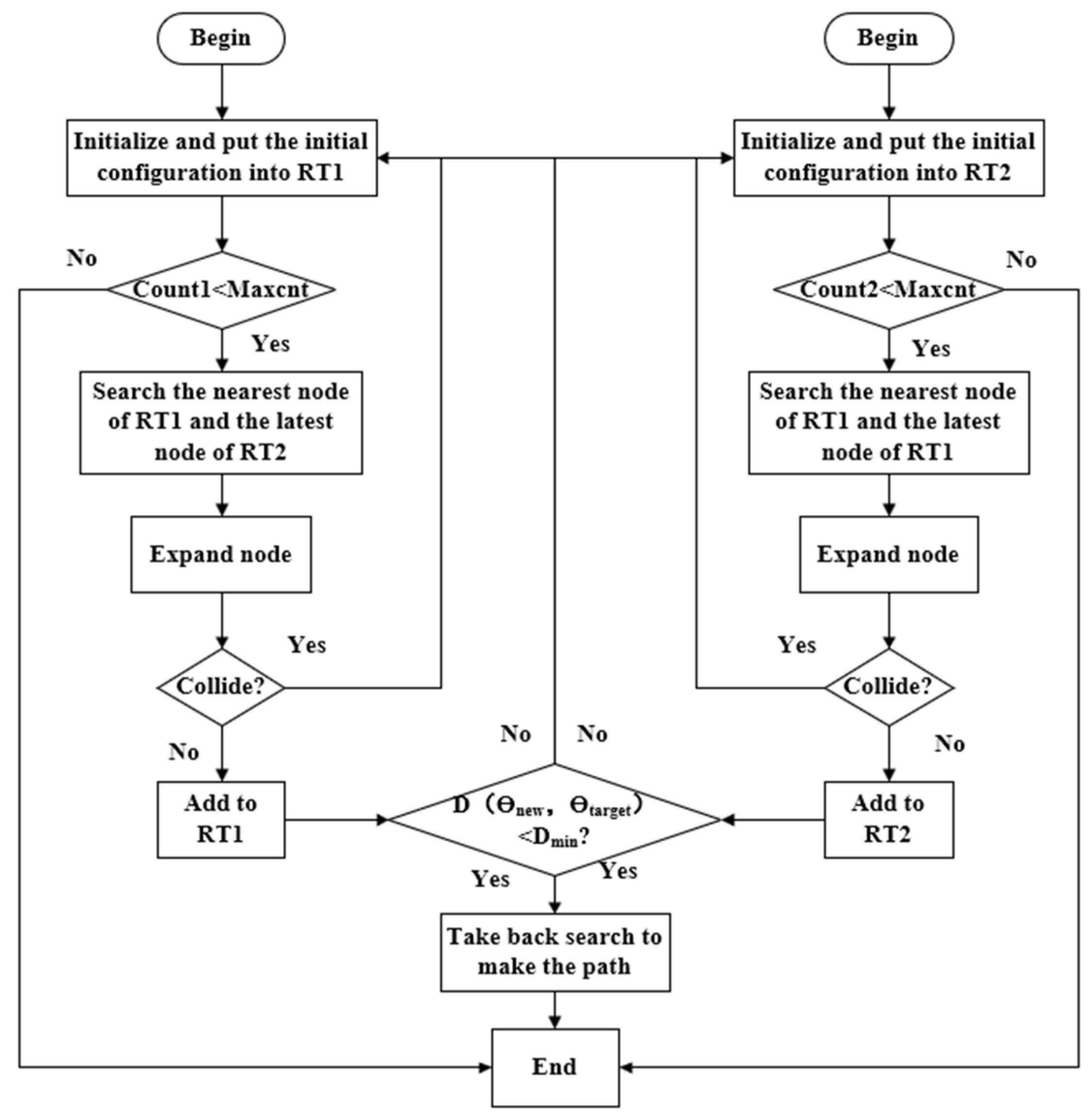
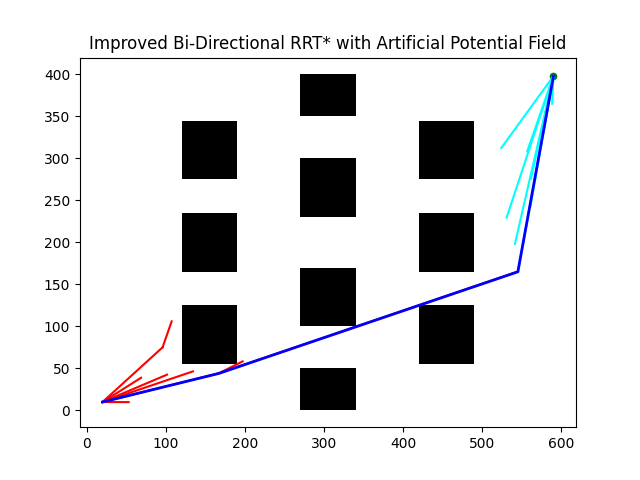
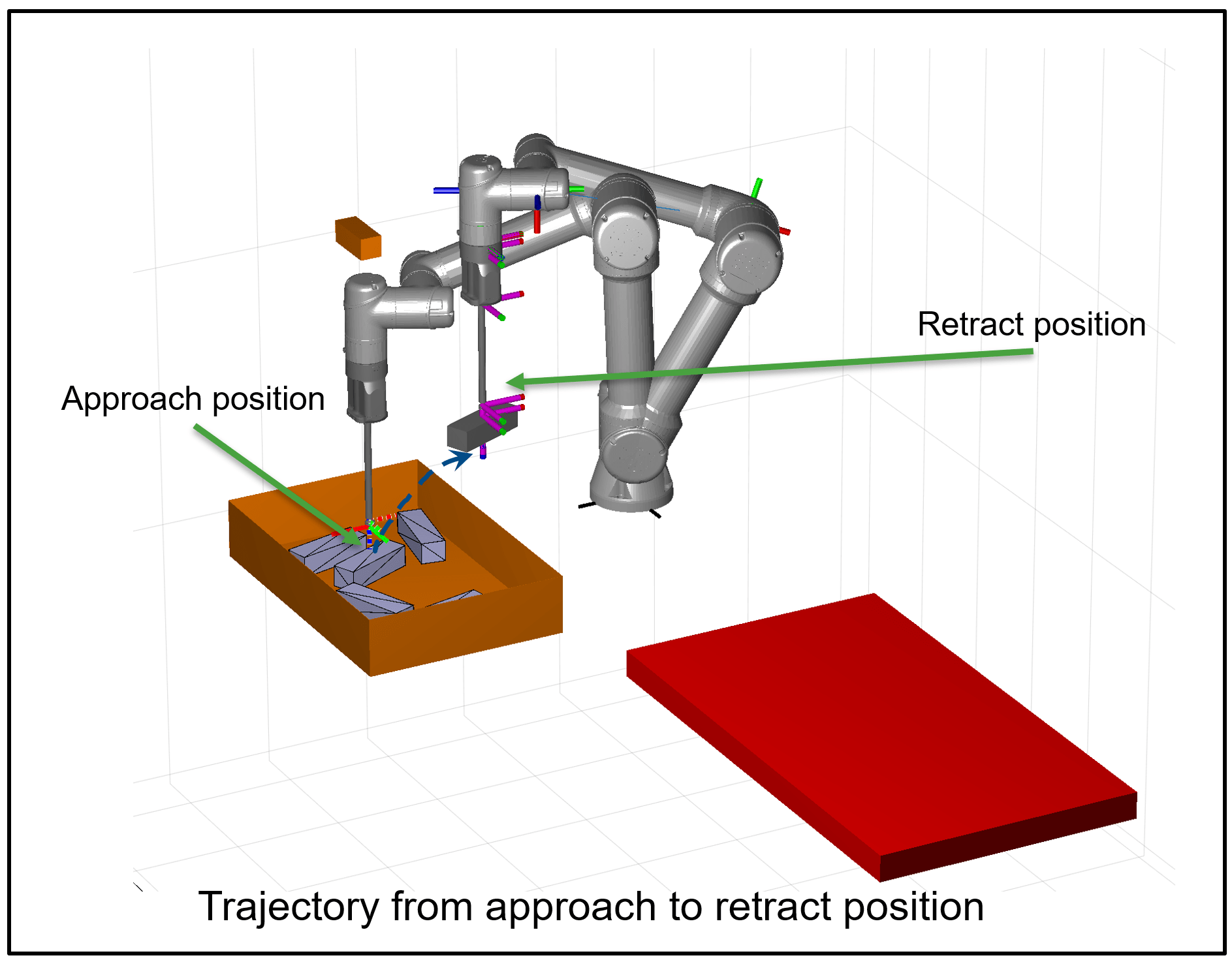
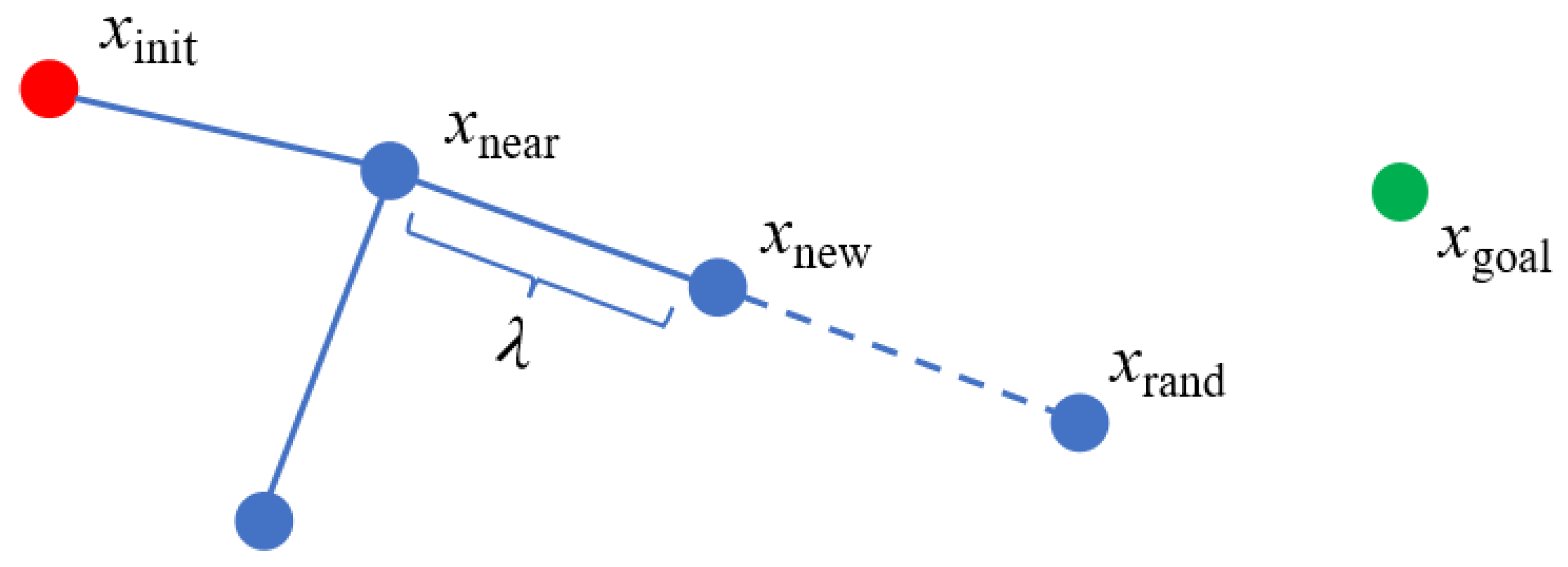
Experience the timeless beauty of bi-directional rrt algorithm for robot manipulators | motion planning with our curated gallery of extensive collections of images. showcasing the classic style of computer, digital, and electronic. designed to evoke timeless elegance. Our bi-directional rrt algorithm for robot manipulators | motion planning collection features high-quality images with excellent detail and clarity. Suitable for various applications including web design, social media, personal projects, and digital content creation All bi-directional rrt algorithm for robot manipulators | motion planning images are available in high resolution with professional-grade quality, optimized for both digital and print applications, and include comprehensive metadata for easy organization and usage. Our bi-directional rrt algorithm for robot manipulators | motion planning gallery offers diverse visual resources to bring your ideas to life. Advanced search capabilities make finding the perfect bi-directional rrt algorithm for robot manipulators | motion planning image effortless and efficient. Whether for commercial projects or personal use, our bi-directional rrt algorithm for robot manipulators | motion planning collection delivers consistent excellence. The bi-directional rrt algorithm for robot manipulators | motion planning collection represents years of careful curation and professional standards. The bi-directional rrt algorithm for robot manipulators | motion planning archive serves professionals, educators, and creatives across diverse industries. Reliable customer support ensures smooth experience throughout the bi-directional rrt algorithm for robot manipulators | motion planning selection process.